这款机器人探索火星速度或为现有探测器三倍
##

腿式机器人在巴塞尔大学的火星实验室进行模拟测试。图片来源:托马斯邦托尼亚利博士
一款新型机器人能够比以往任何时候都更快地探索火星,无需等待人类指令即可扫描岩石以寻找生命线索。
探索其他星球表面是一个谨慎且耗时的过程。在火星上,地球与机器人漫游车之间的通信可能需要4到22分钟。有限的数据传输能力也限制了来回传输的信息量。由于这些挑战,科学家们必须提前规划漫游车的活动。漫游车被设计为节约能源并规避风险,因此它们在崎岖地形上移动缓慢。在大多数情况下,它们每天仅能行驶几百米,这限制了对周围景观的研究范围,也使得收集各类地质样本变得更加困难。
一种能够探索多个目标的半自主机器人
为了克服这些限制,研究人员测试了一种不同的策略。他们开发了一种半自主机器人探测器,能够在无需持续人类指导的情况下从一个目标移动到另一个目标并收集数据。该机器人不再在密切监督下专注于单一岩石,而是可以接近多个地点并在每个地点独立进行测量。
结果表明,配备紧凑型仪器的机器人能极大提升效率。这种方法加快了行星表面的资源勘探和生物特征(即生命迹象)搜索的速度。通过依次分析多个目标,机器人可以在更短时间内收集更多数据。
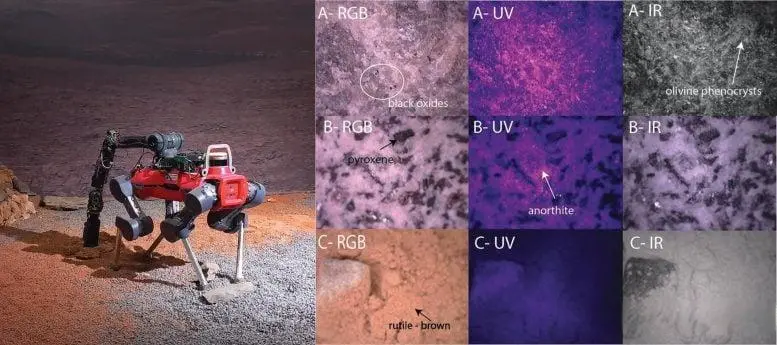
左边是机器人传回的显微成像仪(MICRO)拍摄的图像示例,展示了三种不同月球模拟材料在RGB、UV和IR下的纹理。图片来源:GabrielaLigeza博士
团队着手研究携带相对简单科学工具的机器人能否在快速工作的同时仍能产出有意义的结果。他们的研究结果证实,即使是小型仪器也能实现关键的科学目标,包括识别对天体生物学和资源勘探重要的岩石。
在类火星环境下测试ANYmal机器人
为评估该方法,研究人员使用了四足机器人ANYmal。它配备了一个机械臂,搭载两种仪器:显微成像仪MICRO和为ESAESRIC空间资源挑战赛开发的便携式拉曼光谱仪。该项目涉及与苏黎世联邦理工学院机器人系统实验室、苏黎世联邦理工学院空间研究部门、苏黎世大学及伯尔尼大学的合作。

实验是在巴塞尔大学的Marslabor设施中进行的。该环境使用模拟岩石、表岩屑(即行星尘埃)材料和模拟光照条件来模拟行星表面环境。在测试过程中,机器人自主向选定目标移动,用机械臂定位仪器,并传回图像和光谱数据以供分析。
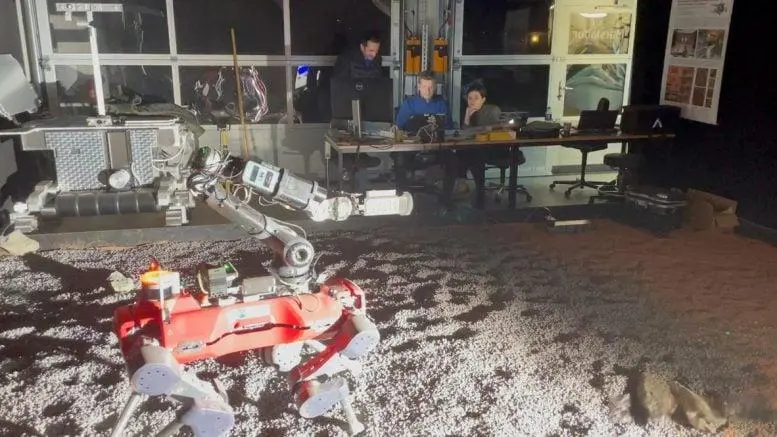
腿式机器人在试验台上的操作设置,背景是控制室和操作人员。图片来源:TomasoBontognali博士
该系统成功识别出多种与行星探测相关的岩石类型,包括石膏、碳酸盐、玄武岩、纯橄榄岩和斜长岩。这些材料中的许多对未来任务都很重要。例如,类似月球的岩石(如富含橄榄石和氧化物的纯橄榄岩、含有钙长石的斜长岩)以及金红石等氧化物可能指示有价值的资源。
多目标探索加速科学发展
研究人员比较了两种方法:一种是传统方法,即科学家引导机器人一次检查一个目标;另一种是半自主方法,即机器人依次研究多个目标。
速度上的差异很明显。多目标任务的完成时间为12到23分钟,而类似的人工引导任务则需要41分钟。
尽管工作速度更快,这个机器人仍保持着高水平的准确性。在一次测试中,它正确识别了所有选定的目标。
这种方法可以让未来的任务覆盖行星表面更大的区域。科学家们可以审查收集到的数据,决定哪些地点值得进一步研究。
通过减少对人类一步步指令的需求,机器人可以在地形上更自由地移动,快速扫描岩石,并收集有价值的数据。这使得更高效地开展科学研究成为可能,并帮助研究人员专注于最有前景的样本。
为未来的月球和火星任务做准备
研究表明,相对简单的仪器与自主机器人系统结合时,仍能产生有价值的科学见解。未来的任务不必完全依赖大型复杂设备,而是可以使用敏捷机器人快速勘测周围环境,识别出需要详细分析的关键目标。
随着航天机构为前往月球、火星及更远星球的任务做准备,这类半自主机器人可能会发挥重要作用。它们能在更短时间内覆盖更多区域,从而为资源勘探和寻找可能存在的过往生命迹象提供支持。
数字对象标识符:10.3389frspt.2026.1741757
相关知识
火星是太阳系中离太阳第四近的行星,属于类地行星。因表面覆盖氧化铁(铁锈)呈现红色,被称为红色星球。它有稀薄的二氧化碳为主的大气层,表面有太阳系最高的火山奥林匹斯山和最大的峡谷水手谷,曾发现液态水存在的痕迹,是人类探索地外生命与未来星际移民的重要目标。
BY: Frontiers
FY: AI
如有相关内容侵权,请在作品发布后联系作者删除
转载还请取得授权,并注意保持完整性和注明出处
(科技责编:拓荒牛








 晋ICP备17002471号-6
晋ICP备17002471号-6