拒绝龟速移动,AI 代替人类成为火星向导,让漫游车能跑得更远
本文为深度编译,仅供交流学习,不代表智子说观点。
在火星表面规划漫游车的行驶路线,通常被视为一场要在地球上远程操控的、缓慢而审慎的“国际象棋博弈”。但在最新的一项测试中,美国宇航局将这一过程中最艰巨的环节之一——路线选择,交给了人工智能系统来完成。
结果是历史性的:美国宇航局的“毅力号”漫游车完成了在另一个星球上的首次行驶任务,其导航航点完全由人工智能生成,而非出自人类规划师之手。
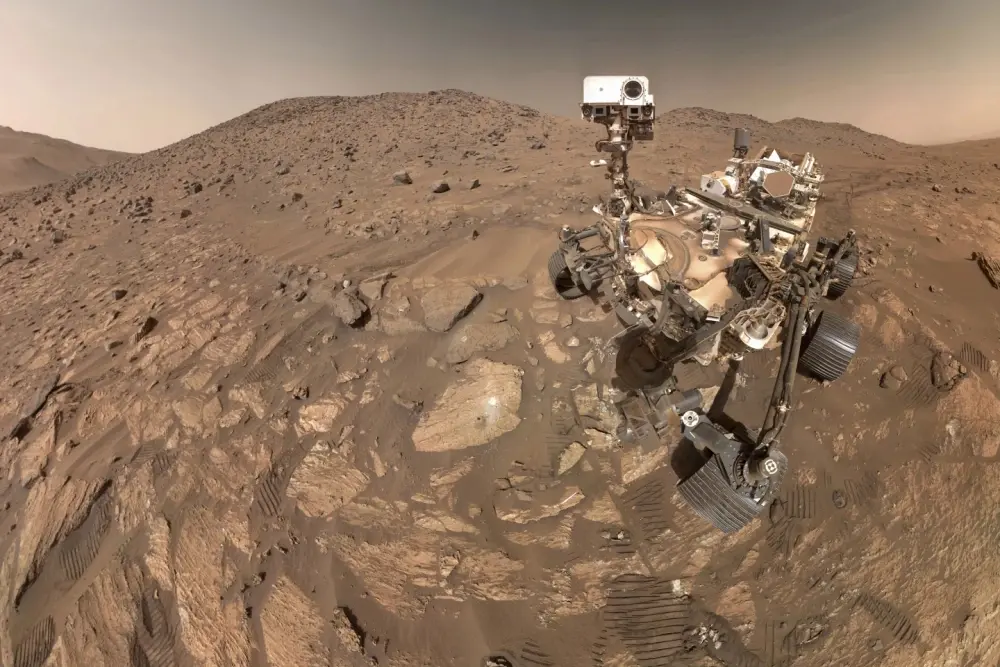
团队采用了一种具备视觉能力的生成式人工智能方法来选择“航点”——即那些引导漫游车安全穿越危险地形的“下一步去哪里”的标记。在将指令上行传输至火星之前,专家们已经在模拟环境中对该计划进行了详尽的测试。
美国宇航局局长贾里德·伊萨克曼表示:“这次演示展示了我们的能力已经取得了多大的进步,并拓宽了我们将如何探索其他世界的方式。”

“像这样的自主技术可以帮助任务更高效地运行,应对具有挑战性的地形,并随着与地球距离的增加而提高科学回报。这是团队在实际操作中谨慎、负责任地应用新技术的有力例证。”

在这次试验中,工程师们依赖了一种通常被称为“视觉-语言模型”的生成式系统。
用通俗的话来说,它“观察”了与人类规划师所使用的相同的任务图像和支持数据。随后,系统建议了一组航点坐标,旨在让漫游车能够穿过崎岖的地面,而不会陷入麻烦之中。

这项工作由喷气推进实验室的漫游车操作中心协调,团队与人工智能公司安索匹克合作,利用其“克劳德”模型来辅助航点选择任务。
这次尝试的目标并非让算法“自由发挥”,而是为了验证人工智能是否能够可靠地处理一项特定的、高风险的规划工作,这项工作通常需要耗费人类大量的时间和专业知识。
火星距离地球如此遥远,以至于你根本无法用操纵杆来“驾驶”漫游车。信号传输耗时过长,即便是微小的延迟也会让实时控制变得不可能。
这就是为什么漫游车团队必须提前进行规划。他们研究地貌,选择一条谨慎的路线,并将其分解为短的片段,以便漫游车始终有一个安全的下一步目标。
传统上,这些路线是由相对紧密间隔的航点构建的——通常在100米或更短的距离——因为火星的地形变化极快。
从上方俯瞰看似平坦的一块地表,可能隐藏着会困住车轮的沙地、威胁底盘的岩石,或者是可能导致漫游车倾覆的斜坡。
一旦计划准备就绪,它就会通过美国宇航局的深空网络发送给漫游车,然后由漫游车自行执行这些指令。
在两次特定的行驶中——即在火星日1707和1709——任务团队将航点规划的工作移交给了人工智能系统。
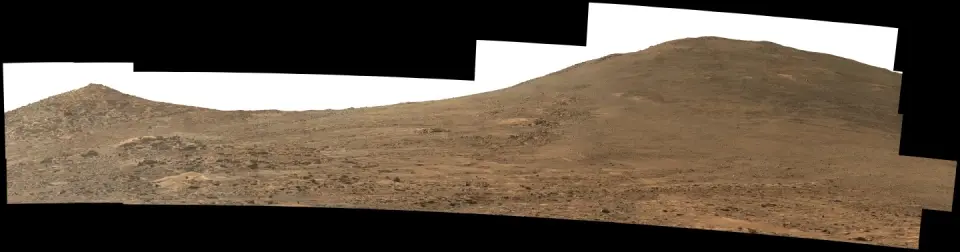
该系统分析了来自火星勘测轨道飞行器上高分辨率成像科学实验相机的高清轨道图像,以及来自数字高程模型的坡度信息。
利用这些输入数据,系统识别了对漫游车安全至关重要的地貌特征,如基岩、露头、巨石场和沙纹。随后,一条包含了漫游车将要跟随的航点标记的连续路线被生成出来。
“毅力号”按照人工智能生成的计划行驶了689英尺(约210米);两天后,它又行驶了807英尺(约246米)。
用漫游车的术语来说,这虽然不算是一次越野长途旅行,但这足以构成一次严肃的操作测试,尤其是当重点在于证明这种规划方法值得信赖时。
在指令离开地球之前,工程师们通过喷气推进实验室的“数字孪生”系统运行了人工智能生成的路线——这是一个漫游车的虚拟复制品,用于测试计划的活动是否会在飞行软件和硬件的限制下表现正常。
在这种情况下,检查并非流于表面。验证步骤评估了超过50万个遥测变量,实质上是针对一份巨大的“可能出错”的细节清单,对计划进行了压力测试。
在计划通过了这些严苛的测试后,才被发送给漫游车。
这种自动化之所以具有吸引力,原因很简单:漫游车团队的时间有限,而火星却极其辽阔。
如果你能安全地减少常规驾驶计划中的人类工作量,你就可以行驶得更远、更频繁,或者将团队更多的注意力投入到那些真正需要人类判断的科学决策上。
喷气推进实验室探索系统办公室经理马特·华莱士指出:“想象一下,智能系统不仅存在于地球地面,还存在于我们的漫游车、直升机、无人机和其他表面设备的边缘应用中,这些系统都经过了我们美国宇航局工程师、科学家和宇航员集体智慧的训练。”
(科技责编:拓荒牛
 晋ICP备17002471号-6
晋ICP备17002471号-6