机器人用固态激光雷达“三国杀”
 芝能智芯出品
芝能智芯出品在全球的激光雷达市场中,汽车领域目前形成了禾赛科技、华为引望、速腾和图达通四家企业。
而在L2+之外,面向Robotaxi也是很大一块需求,而智能制造与柔性物流高速发展的当下,移动机器人(非人形机器人)也是一块很大的市场。
在这个领域中,因为控制器的算力有限而环境相对简单,基于原有MCU的控制策略下,便宜的激光雷达就形成一个很重要的补充。
复杂动态环境中,定位漂移、导航误差以及光照干扰等问题会影响产品的工作情况,影响效率与安全,所以不管是割草机还是泳池机器人,搬运机器人也开始进入。
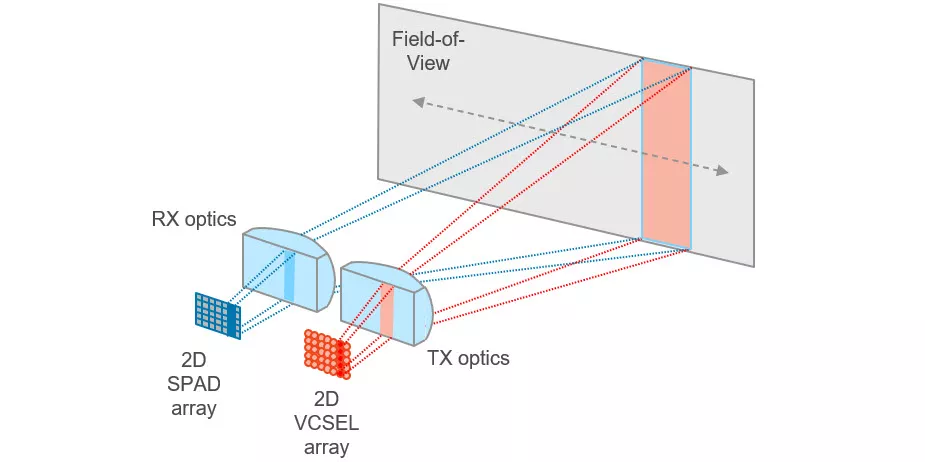
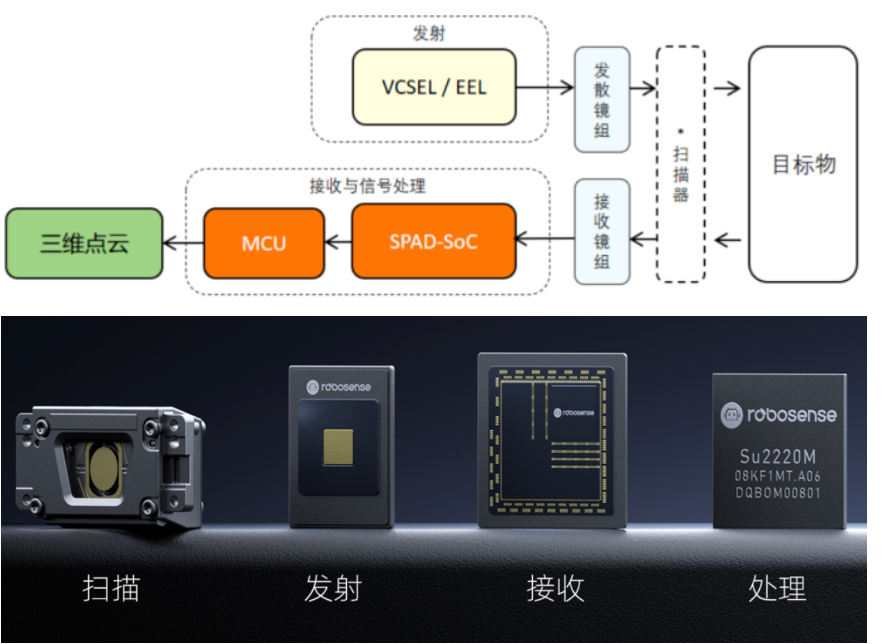
VCSEL和SPAD是固态激光雷达的核心
2025年中国的激光雷达企业开始往这个领域扎堆。
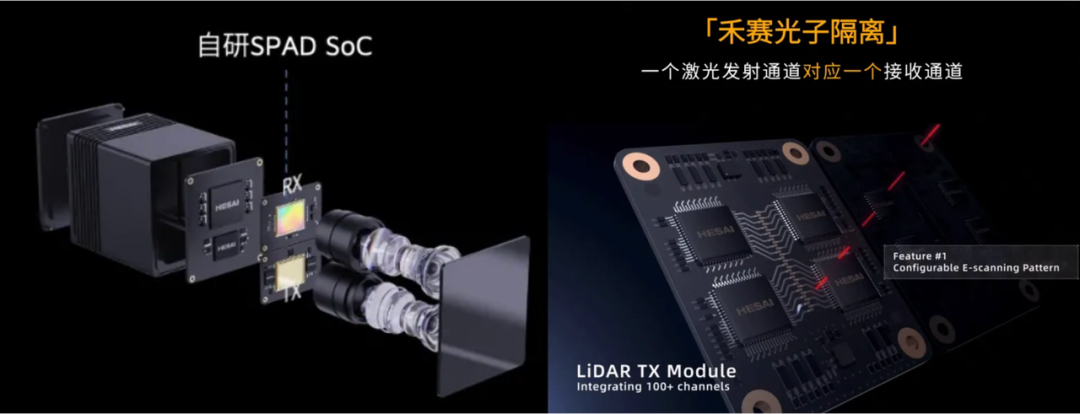
前段时间禾赛发布自研RISC-V激光雷达主控芯片费米C500和「光子隔离」安全技术。费米 C500 采用自主可控的 RISC-V 架构,单芯片集成 MCU、FPGA、ADC 于一体,内置点云智慧引擎 IPE 的激光雷达专用主控芯片,集成 256-core 波形处理核,环境噪点智能滤除。
禾赛通过四代芯片平台研发,激光器、探测器、激光驱动器、TIA 芯片、ADC 芯片、数字信号处理器和控制器都自研了。
800 线 SPAD 数字激光雷达ETX 搭载远距激光雷达的自研 SPAD-SoC 芯片,可搭载于舱内挡风玻璃后,实现 400 米的超远测距能力(@10%反射率),角分辨率最高可达 0.05° x 0.025°。
FTX 第二代纯固态车规级激光雷达采用纯固态电子扫描技术做到了水平视场最大可支持 180°,垂直视场 140°。
激光雷达编码技术,解决了来自于其他激光雷达的干扰下导致的「误触发问题」,传统 SPAD 主激光雷达方案无法保障安全性,因其方案仅使用少量几颗激光器发光,同时接收端数十个接收通道并行收光、彼此间不隔离,引起“鬼影”、“高反膨胀”、“误滤除”等安全风险。
“鬼影”是指没有目标物的情况下探测到了有目标物信号的现象;“高反膨胀”是指在扫描高反射率物体时,点云膨胀失真的情况,用算法全部滤除相关区域,进而导致关键信息被“误滤除”。
光子隔离技术确保每个激光通道接收到的光子彼此间互不干扰,上百颗激光器对应上百个探测通道,有效避免因为通道间串扰而产生“鬼影”,每颗激光器可以独立发光且具有动态曝光功能。
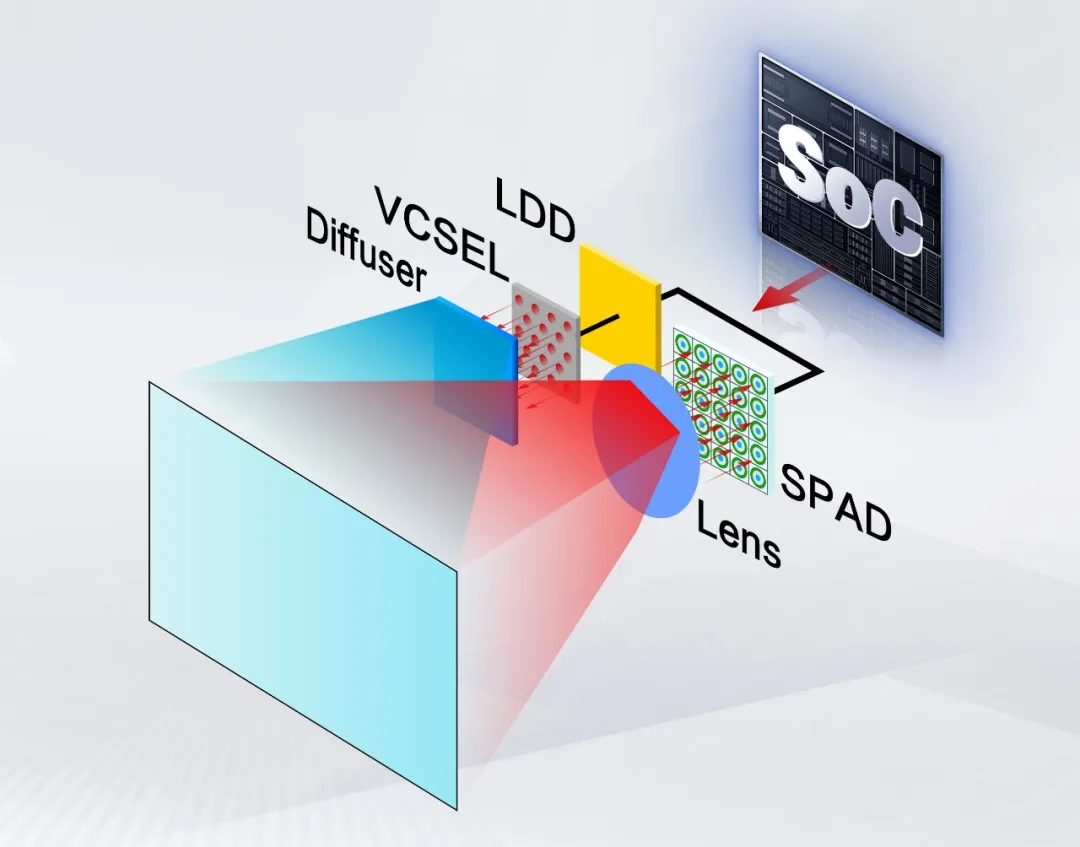
在固态激光雷达的路线上,华为也是一个大玩家,核心性能取决于VCSEL、LDD、SPAD三类关键芯片的协同表现。
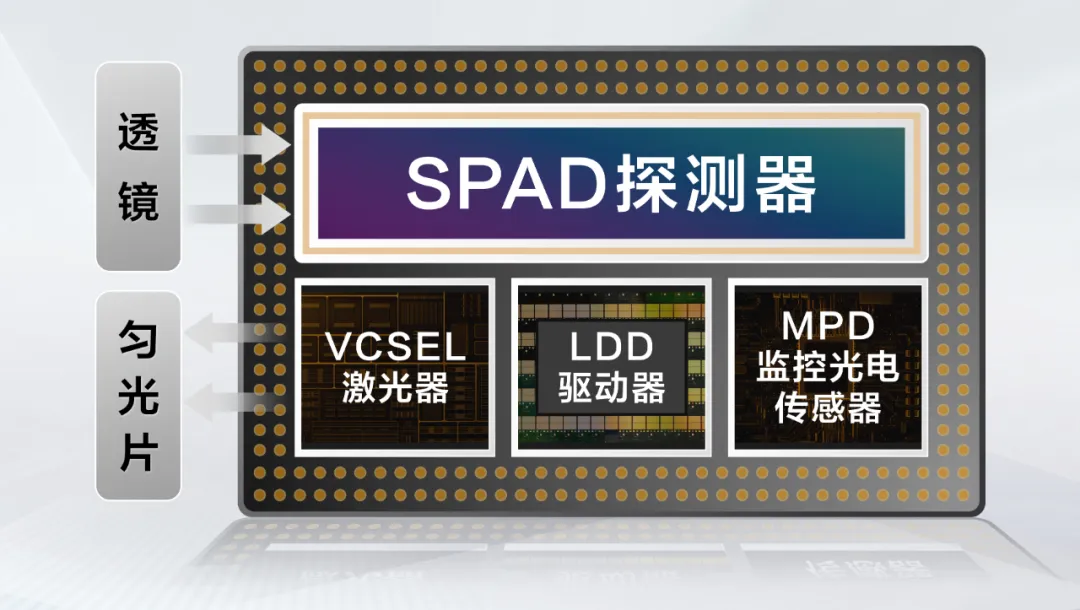
海思推出的 S1970 高精度固态激光雷达解决方案,从芯片层面打通VCSEL发射、LDD驱动与SPAD接收链路,实现系统级协同设计。
S1970 搭载的背照式SPAD探测芯片在940nm波段实现高达30% 的光子探测效率,在夜间或强光干扰环境中也能稳定感知,高分辨率TDC与250ps时间精度让每一次距离测量都更加精准。
VCSEL 激光器芯片则以 50% 功率转换效率与 100W 峰值光功率提供更稳定、更节能的发射能力。
配套的 LDD 驱动芯片支持低抖动、大电流与12通道分时驱动,在高重频扫描中依然保持精准的脉冲控制,为成像与测距提供坚实基础。
S1970 提升了系统集成度并简化板级设计,堆垛 AGV 已在安博物流园7号仓库投入使用,也适用于割草机器人、测绘机器人、城服机器人及行业无人机等多类场景。
速腾聚创在之前的技术路线出现偏差以后,也开启了固态激光雷达的开发,APU,MCU集成了并且在激光雷达芯片中引入RISC-V作为APU和MCU架构。
速腾聚创EM4,最高做到2160线,吉利汽车浩瀚-S架构暨极氪9X千里浩瀚H9版本上,定制的RoboSense速腾聚创520线激光雷达。
根据速腾聚创披露的信息,已经解决高反膨胀、环境光干扰、污渍遮挡、雨雪噪点等使用SPAD要克服的关键点,达到大规模量产上车的标准。
小结:在这个赛道上,从车里卷到了机器人领域,卷还是特别卷的。
(科技责编:拓荒牛








 晋ICP备17002471号-6
晋ICP备17002471号-6